Basis of Diffusion Model
约 1350 个字 1 张图片 预计阅读时间 4 分钟
写于 2025 年 7 月,整理自我从零开始学习 Diffusion 模型的笔记过程。目前这里还是比较基础的内容,正在整理更多的内容(如 Score-based Model, Latent Diffusion, Flow-based Model 等)。
—— Xi Lin, 2025.12
这篇博客记录我的 Diffusion 模型学习过程,主要关注在对 Diffusion 模型架构的理解。
Derivation of Diffusion Model
简要概括 diffusion 的过程,就是分为 Forward 和 Reverse 两个过程。Forward 负责将图像不断加噪声,直到得到一张纯噪声图片。而 Reverse 过程则是通过 sample 一个噪声,然后不断去噪,直到得到一张完整的图片。
Question
基于这个理解,我们接下来关注几个问题:
- 如何形式化描述 Forward 和 Reverse 这两个过程?
- 在 Training 和 Inference 中,Forward 和 Reverse 这两个阶段如何参与?
下面基于 DDPM 来去理解一下 diffusion 的过程。
Forward
首先我们看前向加噪声的过程。
对于一个输入图像 \(x_0\),我们经过 \(T\) 步加噪过程后,会得到一个长度为 \(T\) 的序列 \([x_0, x_1, \cdots, x_T]\)。其中第 \(t\) 步的图像为 \(x_t\)。
我们将加噪过程描述为 \(q(x_t|x_{t-1})\),即输入为 \(x_{t-1}\),输出为 \(x_{t}\)。这个过程描述为一个正态分布:
其中这里的 \(\beta_t\) 是一个控制每一步加噪过程方差的超参数。
接下来对这个加噪过程进行重参数化,得到:
其中 \(\epsilon\) 是一个标准正态分布的噪声。
进一步的,我们可以写出
将其代入上式,得到:
我们定义 \(\alpha_t = 1-\beta_t\),则上式可以写为:
对于后两项噪声项,我们可以将其看成两个正态分布的线性组合,因此可以将其看成一个新的正态分布:
不断递推至 \(t=0\),我们可以得到:
其中 \(\bar \alpha_t = \prod_{i=1}^t \alpha_i\)。
由于 \(\beta_t\) 是一个超参数,因此我们就得到了一个加噪声的过程 \(q(x_t|x_0)\),它是一个正态分布:
Reverse
接下来我们看去噪的过程。去噪的过程是一个条件概率分布 \(p_\theta(x_{t-1}|x_t)\),其参数 \(\theta\) 是通过训练得到的。
我们可以将其写为一个正态分布:
其中 \(\mu_\theta(x_t, t)\) 和 \(\Sigma_\theta(x_t, t)\) 是通过神经网络得到的。
这里我们为了简化,假设 \(\Sigma_\theta(x_t, t)\) 是一个常数 \(\sigma^2 I\),则上式可以简化为:
我们的目标是,如果我们能够得到逆向的加噪声过程 \(q_(x_{t-1}|x_t)\),那么就可以从一个纯噪声图像 \(x_T\) 开始,经过 \(T\) 步去噪,得到一张完整的图像 \(x_0\)。但是我们并不知道 \(q(x_{t-1}|x_t)\) 的具体形式。
我们可以通过贝叶斯公式得到:
这样就将所有逆向过程都又转化为了正向过程。经过推导我们可以得到这个正态分布的形式:
而在加噪过程中我们已经知道了 \(q(x_t|x_0)\) 的形式,因此可以将其代入上式,得到:
由此,对于每一步去噪过程的估计,就可以看作是对噪声 \(\epsilon_\theta(x_t, t)\) 的估计。我们可以通过训练一个神经网络来学习这个噪声的估计。
Training and Inference
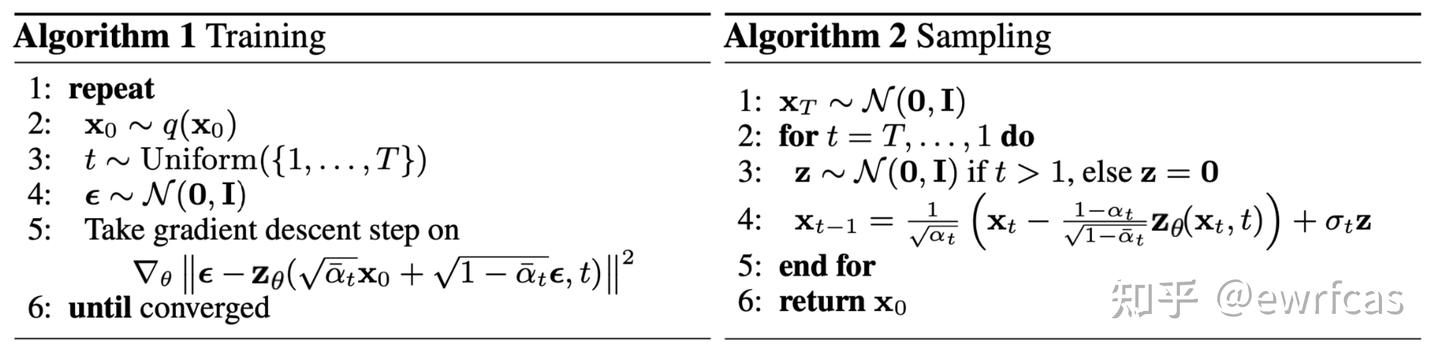
在训练阶段,我们通过最小化以下损失函数来训练模型:
将 \(x_t\) 的形式代入上式,得到: \(L(\theta) = \mathbb{E}_{x_0, t, \epsilon} \left[ ||\epsilon - \epsilon_\theta(\sqrt{\bar\alpha_t} x_0 + \sqrt{1-\bar\alpha_t}\epsilon, t)||^2 \right]\)
在推理阶段,我们从一个纯噪声图像 \(x_T\) 开始,经过 \(T\) 步去噪,得到一张完整的图像 \(x_0\)。每一步去噪都使用训练好的模型 \(\epsilon_\theta(x_t, t)\) 来估计噪声。
Question
在学习了基本概念之后,接下来关注以下几个问题:
- 目前的 Diffusion Model 是如何对这个 denoising 过程进行建模的?对于一个 text-to-image 的任务来说,input text 携带的信息是如何参与这个 denoising 过程的?
- Denoising steps 这个参数是由模型决定,在训练阶段固定的吗?还是说可以 dynamic 调整?